Бо такя ба сиёсатҳои "Истеҳсолшуда дар Чин 2025" ва "Истеҳсоли интеллектуалӣ", роботҳои саноатӣ калиди баланд бардоштани самаранокии истеҳсолот ва автоматизатсия гардидаанд. Драйверҳои муҳаррики серво, модулҳои барқӣ ва контроллерҳо, ҳамчун ҷузъҳои асосӣ, вазифаҳои калидии дақиқии баланд, бори баланд ва кори устуворро иҷро мекунанд. Рушди роботҳо ба самти дақиқии баланд ва зеҳнӣ талаб мекунад, ки ҷузъҳо ба монанди конденсаторҳо устувории аъло, зидди халал ва умри дароз дошта бошанд, то кори самаранок ва боэътимоди системаро таъмин кунанд.
Роботи саноатии 01 Сервои муҳаррики ронанда
Моторҳои сервои роботҳои саноатӣ бояд бо ларзиш ва садои электрикӣ таҳти сарбории баланд ва басомади баланд мубориза баранд, аз ин рӯ устуворӣ ва дақиқии манбаи барқ муҳим аст. Конденсаторҳо бояд андозаи хурд ва иқтидори калон дошта бошанд, то устуворӣ ва эътимоднокиро таъмин кунанд ва дақиқии идоракуниро беҳтар созанд.
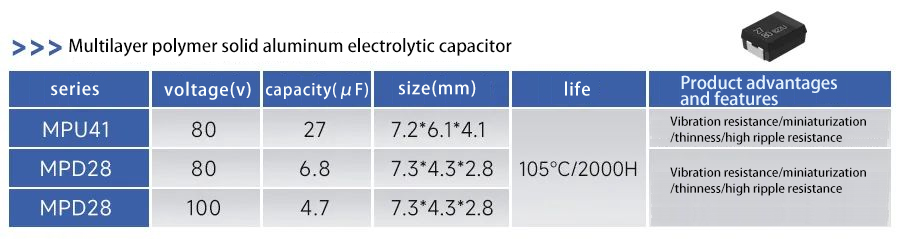
Ламинатсияшудаконденсаторҳои электролитии алюминийи сахти полимерӣметавонад самаранокӣ ва эътимоднокии гардонандаҳои муҳаррики сервои роботи саноатиро беҳтар созад ва ба муҳити кории басомади баланд ва борбардор мутобиқ шавад. Муқовимати ларзиш ба конденсатор имкон медиҳад, ки дар ларзишҳои механикии зуд-зуд рухдода кори устуворро нигоҳ дорад ва эътимоднокии гардонандаро беҳтар мекунад; тарҳи миниатюрӣ/лоғар ба кам кардани андоза ва вазни гардонандаи муҳаррик мусоидат мекунад, истифодаи фазо ва чандирии системаро беҳтар мекунад; қобилияти тоб овардан ба ҷараёнҳои калони мавҷӣ сифати ҷараёнро беҳтар мекунад, дахолати садои таъминоти барқро ба идоракунии муҳаррики серво кам мекунад ва дақиқии идоракуниро беҳтар мекунад.
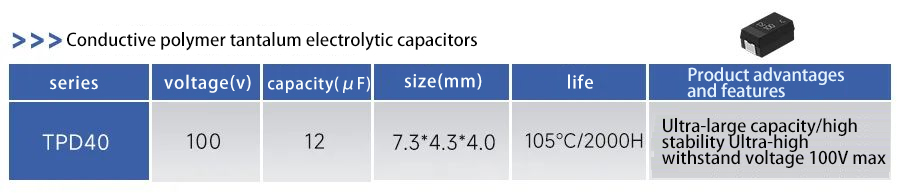
Конденсаторҳои электролитии танталии полимерии ноқилӣзахираҳои энергияи иқтидори ултра калон доранд, ки метавонанд ба талаботи оғоз ва кори драйверҳои сервои муҳаррик бо бори баланд ҷавобгӯ бошанд ва қобилиятҳои вокуниши динамикӣ ва устувории системаро беҳтар созанд; устувории баланд устувории шиддат ва иқтидорро дар шароити дарозмуддат ва боркунии баланд таъмин мекунад ва аз таъсир расонидан ба дақиқии контроллер пешгирӣ мекунад; шиддати ултрабаланд тобовар (ҳадди аксар 100В) ба он имкон медиҳад, ки дар муҳитҳои баландшиддат боэътимод кор кунад ва аз таъсири ноустувории шиддат ва зарбаҳои ҷараён ба система самаранок пешгирӣ кунад ва кори устувори контроллери сервои муҳаррикро таъмин намояд.
Модули барқии роботи саноатии 02
Модулҳои барқии роботҳои саноатӣ бояд дар зери бори баланд устувор кор кунанд, ноустувории шиддат ва тағйироти ҷараёни муваққатиро ҳал кунанд ва аз таъсир расонидан ба идоракунии дақиқи робот худдорӣ кунанд. Конденсаторҳо бояд қобилиятҳои қавии вокуниши муваққатӣ дошта бошанд ва дар андозаи хурд зичии баланди барқро таъмин кунанд.
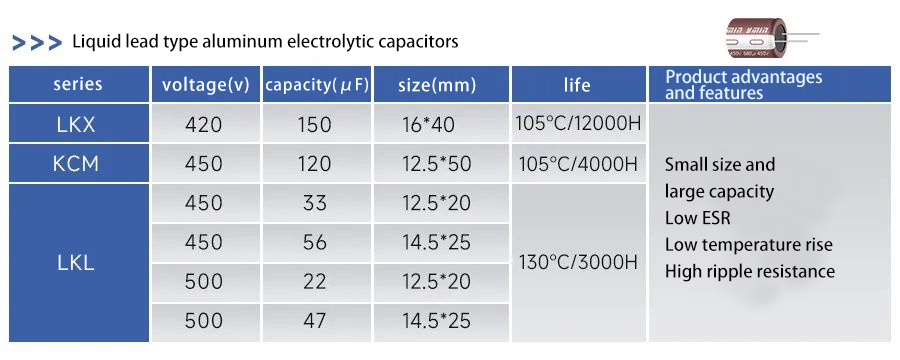
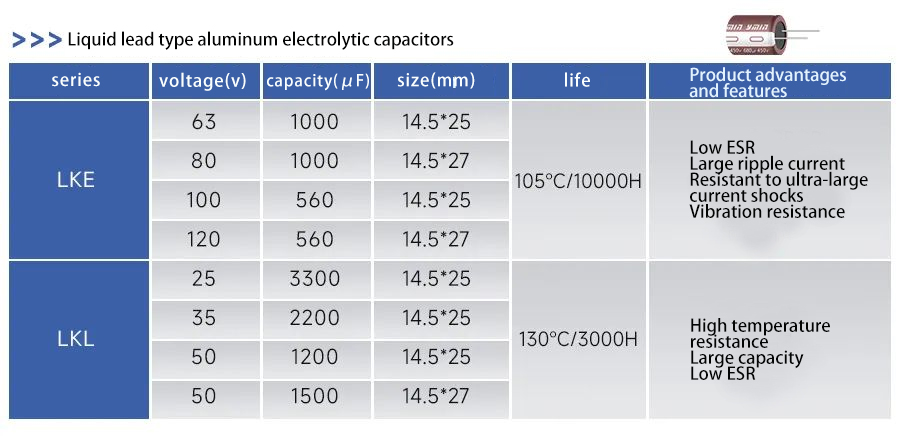
Умри дарозиконденсаторҳои электролитии алюминийи навъи сурби моеъкори устуворро дар зери бори баланд ва кори пайвастаи 24-соатаро таъмин мекунад ва хатари қатъи барқро кам мекунад. Муқовимати қавии мавҷҳо ноустувории барқро самаранок устувор мекунад, баромади устувори шиддатро таъмин мекунад ва дақиқии идоракунӣ ва устувории ҳаракати роботро беҳтар мекунад. Қобилияти қавии вокуниши муваққатӣ метавонад ноустувории ҷараёнро ҳангоми суръат гирифтан, суст шудан ва зуд оғоз шудани робот зуд танзим кунад, таъминоти доимӣ ва устувори барқро таъмин кунад ва аз таъсир расонидан ба кори дақиқи робот пешгирӣ кунад. Дар айни замон, тарҳи андозаи хурд ва иқтидори калон ба талаботи модули барқ барои паймон ва зичии баланди барқ ҷавобгӯ буда, кори сабук ва самараноки роботро дастгирӣ мекунад.
03 Идоракунандаи роботи саноатӣ
Контроллерҳои роботҳои саноатӣ бояд бо ноустувории барқ ва қатъи фаврии барқ мубориза баранд, то кори пайвастаи роботро таъмин кунанд. Конденсаторҳо бояд ба талаботи баланди барқ зуд посух диҳанд, қувваи фаврӣ таъмин кунанд ва дар муҳитҳои ҳарорати баланд ва боркунии баланд устувор бошанд, то системаҳои самаранок ва устуворро таъмин кунанд.
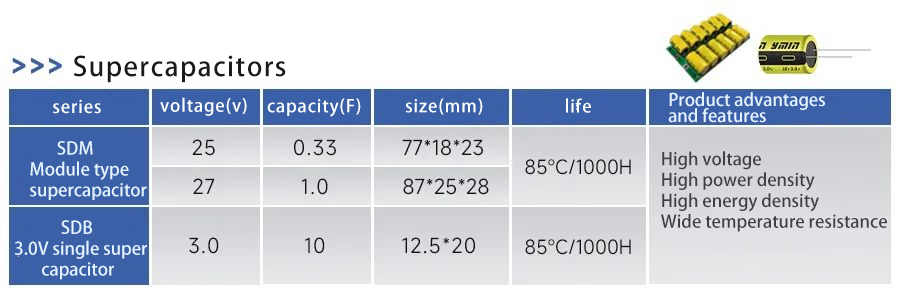
Модулӣсуперконденсаторҳонақши нерӯи эҳтиётиро дар контроллерҳои роботҳои саноатӣ мебозанд ва кафолат медиҳанд, ки робот ҳангоми тағйирёбии манбаи барқ ё қатъ шудани барқ ба кор идома медиҳад. Имкониятҳои пуркунии зуд ва холӣ кардани онҳо ба талаботи баланди барқ мутобиқ мешаванд ва дастгирии фаврии барқро таъмин мекунанд; мӯҳлати тӯлонии онҳо хароҷоти нигоҳдорӣ ва ивазкуниро кам мекунад; ва устувории васеи ҳарорати онҳо кафолат медиҳад, ки онҳо метавонанд дар ҳарорати шадид самаранок кор кунанд, ки онҳоро кафолати муҳими барқ барои контроллерҳои роботҳои саноатӣ мегардонад.
Навъи SMDконденсаторҳои электролитии алюминийтарҳрезии модулҳои барқии роботро бо хусусиятҳои хурди онҳо, кам кардани ҳаҷм ва вазн, беҳтар кардан; иқтидори баланд ба талаботи кунунии контроллер ҳангоми оғоз ва тағирёбии бор ҷавобгӯ буда, устувории системаро таъмин мекунад; импеданси паст талафоти энергияро кам мекунад ва самаранокии барқро беҳтар мекунад; ва қобилияти тоб овардан ба ҷараёни калони мавҷӣ таъминоти устувори барқро барои роботҳои саноатӣ ҳангоми кор бо суръати баланд таъмин мекунад ва дақиқии вокуниш ва устувории умумии системаи идоракуниро беҳтар мекунад.

Конденсаторҳои электролитии алюминийи навъи сурби моеъбарои контроллерҳои роботҳои саноатӣ хусусиятҳои пасти ESR-ро таъмин мекунанд, ки тавлиди гармиро кам мекунанд ва мӯҳлати кори конденсаторро дароз мекунанд; онҳо қобилияти муқовимат ба ҷараёнҳои калони мавҷнокро доранд, то устувории манбаи барқро таъмин кунанд; онҳо метавонанд ба зарбаҳои ҷараёнҳои хеле калон тоб оваранд, то бо тағирёбии ҷараён ҳангоми оғоз ё хомӯшӣ мубориза баранд; муқовимати қавии ларзиши онҳо кафолат медиҳад, ки конденсатор ҳангоми кори пурбор устувор боқӣ мемонад; иқтидори калони онҳо дастгирии кофии барқро барои таъмини кори самараноки система фароҳам меорад; ва муқовимати баланди ҳарорати онҳо зарарро ба конденсаторҳо дар муҳитҳои баландҳарорат кам мекунад ва устувории дарозмуддатро таъмин мекунад.
04 Хулоса
Рушди роботҳои саноатӣ ба самти дақиқӣ ва зеҳни баландтар талаботро ба ҷузъҳо ба монанди конденсаторҳо афзоиш додааст. Дар оянда, зеҳни сунъӣ, Интернети ашё ва технологияҳои 5G роботҳоро бо муҳитҳои мураккабтар ва талаботи баландтар рӯбарӯ хоҳанд кард. Конденсаторҳо дар беҳтар кардани эътимоднокӣ ва самаранокии система нақши калидӣ хоҳанд дошт. Конденсаторҳои YMIN инчунин барои дастгирии кори самаранок ва устувори роботҳои саноатӣ дар сенарияҳои мураккаб ва мусоидат ба табдили интеллектуалии саноати истеҳсолӣ оптимизатсия ва такмилро идома хоҳанд дод.
Вақти нашр: 06 феврали соли 2025